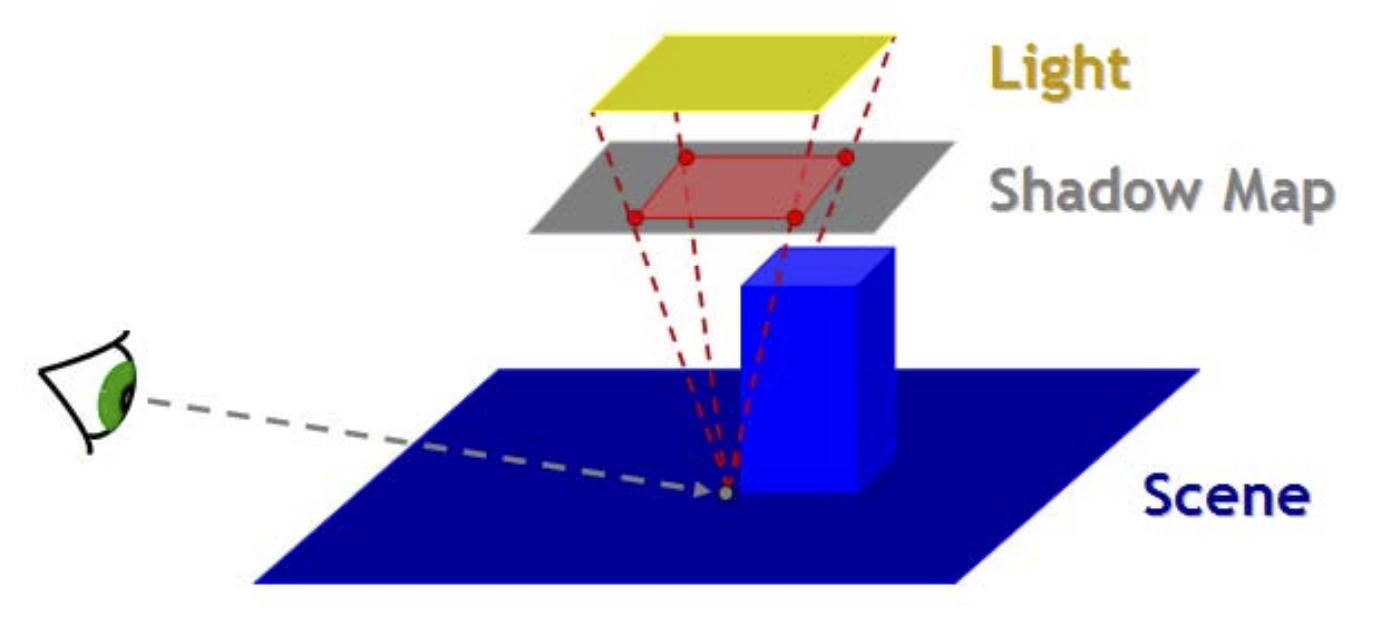
1 Shadow Mapping
- 渲染两趟(2-pass)
- 是一个图像空间中的算法
- Pass 1
- 从光源位置渲染场景,输出离光源最近的深度,即为shadow map
- Pass 2
- 从相机出发,先找到当前像素位置看到的物体表面位置
- 从该位置向光源方向投影到shadow map上,查找是否被遮挡
- 相较于shadow ray的优势
- shadow ray在每个交点处对所有光源发射,每发射一次都要与场景求交,开销大
- shadow map只需要在第一趟求交,之后判断遮挡只需要查询shadow map
- 优点
- 不需要了解场景的实际几何分布,只需要有shadow map
- 缺点
- shadow map将场景的深度分布离散化,在一个像素区域内深度值为常数
- 容易造成自遮挡、锯齿
- 自遮挡解决办法
- 增加小量bias,只有距离超过bias才认为被遮挡
- bias可以为变量,例如根据夹角动态地调整
- 如果bias过大,会造成不接触的阴影(detached)
- Second-depth shadow mapping
- 在shadow map中储存第二小的深度
- 将最小深度和第二小深度的中间值作为深度比较的参考值
- 解决自遮挡问题,并且不需要引入bias
- 缺点
- 模型必须封闭(watertight)
- 维护两个最小值,开销更大
2 Shadow Mapping的数学原理
实时渲染中,许多不等式都把它看做左右两边近似相等
重要近似:

- 分母用于将f(x)的积分值归一化
什么时候该近似比较准确
- 积分区域比较小
- g(x)在积分域范围内变化非常小(smooth)
利用该近似处理渲染方程
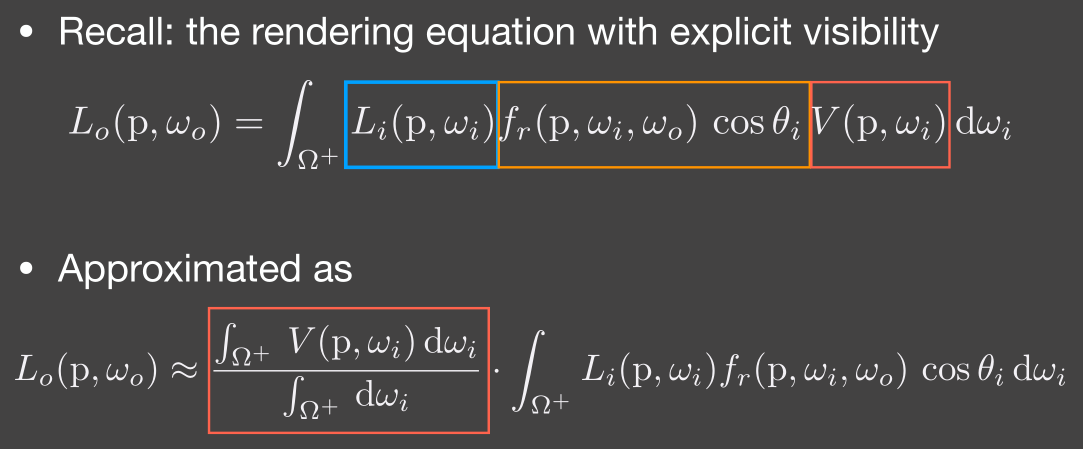
- 把visibility项提出来
- 左边是visibility,右边是shading
- 即为shadow map的思路
- 为何shadow mapping的近似是准确的
- 光源为点光源/方向光源时,只需要在一个点/一个方向上积分,积分域很小
- 光源亮度为常数、brdf为diffuse时,右边shading项的值是smooth的
3 软阴影 —— Percentage closer soft shadows(PCSS)
3.1 Percentage Closer Filtering(PCF)
用于做抗锯齿(anti-aliasing)
filter不是对最后的生成结果做,也不是对shadow map做,而是在阴影判断的时候做
算法思路
- 之前的visibility值是非0即1的,而该算法中visibility是一个0到1之间的值
- 在shadow map中查询时,改为查询目标位置附近的一个block,并对查询结果做平均
例子
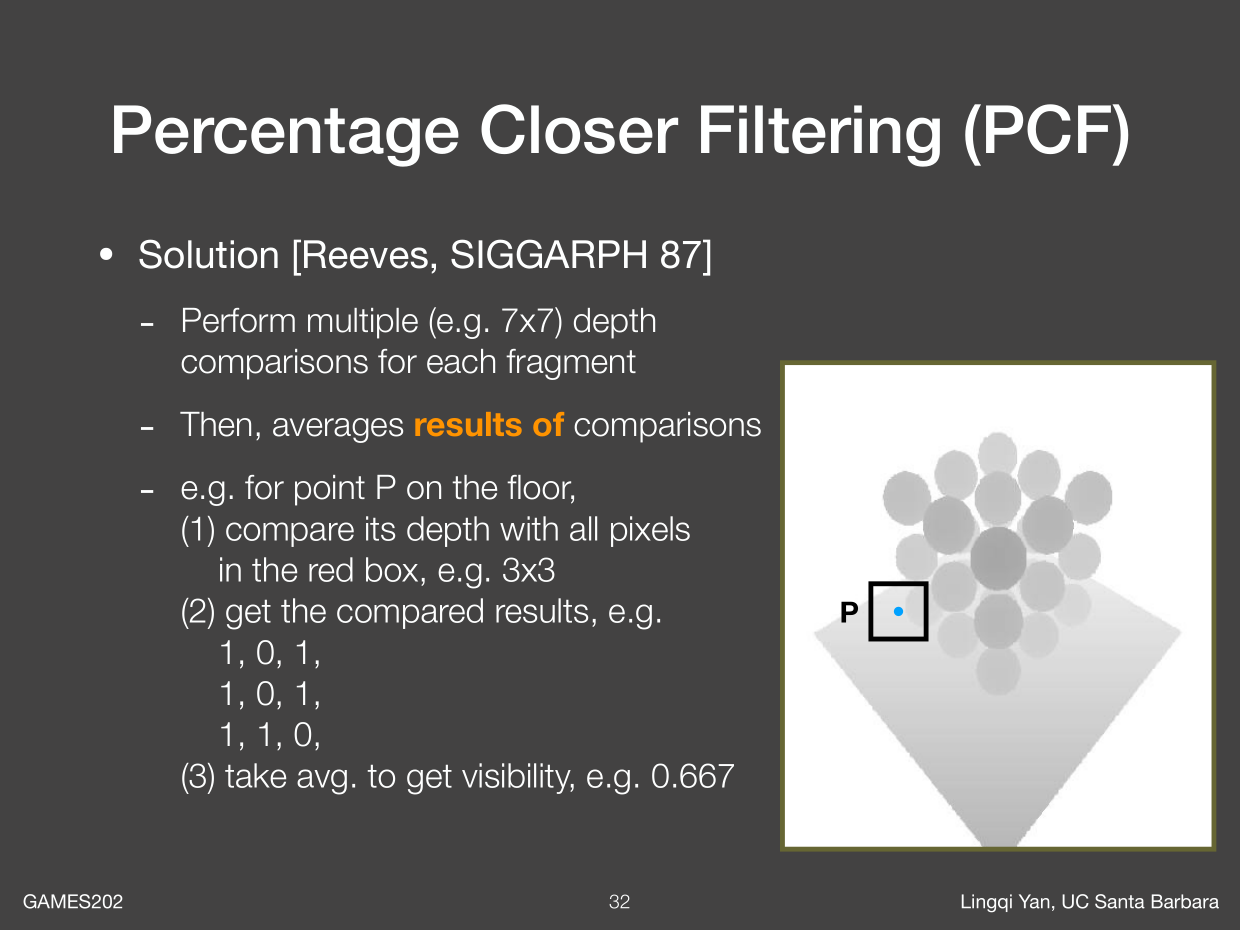
filter越小,阴影越硬;filter越大,阴影越软
- 由此思路,可以利用PCF算法做软阴影效果
3.2 Percentage Closer Soft Shadows(PCSS)
软阴影的形成原因:现实中的光源一般不是点光源,而是有一点宽度的光源
观察现实中的阴影发现,影子距离遮挡物越远,表现的效果越软
示意图
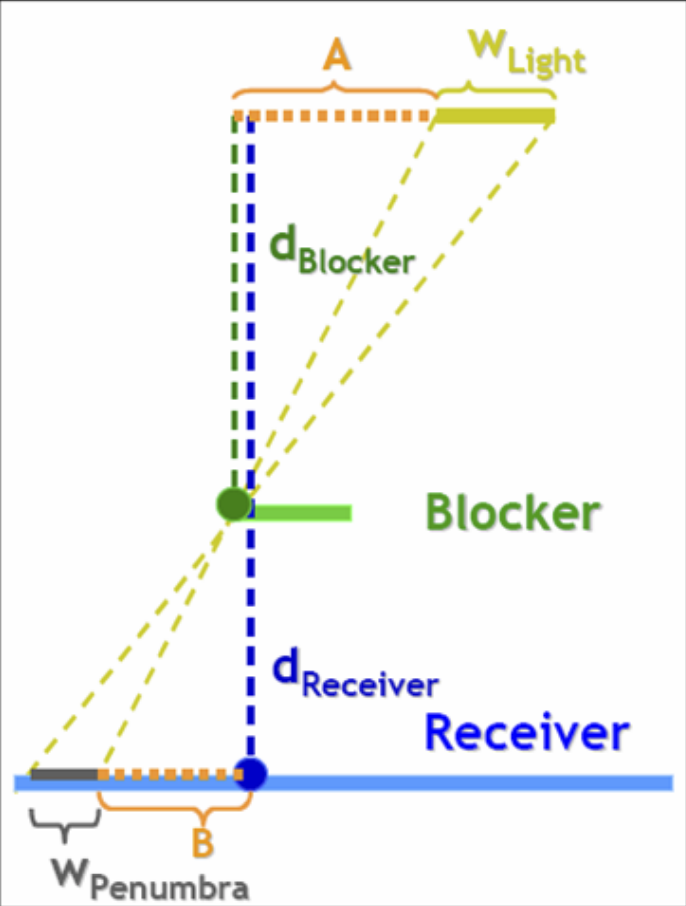
$w{Penumbra}$越大,阴影越软;其大小与光源宽度$w{light}$以及blocker在光源与receiver之间的位置有关
由相似三角形关系可得:

算法流程
- 在面光源处生成一张shadow map
- 把面光源看做在其中心位置的一个点光源,以生成shadow map
- 找到blocker对应的所有像素 (blocker search)
- 对于一个shading point,在shadow map中取对应的一个区域,判断遮挡关系
- 对这些遮挡位置的深度值做平均,记为blocker的深度
- 注意是对遮挡物的深度做平均,而不是对整个区域做平均!
- 确定filter大小
- 根据平均得到的blocker深度,根据上面的数学公式,确定filter的size
- 执行PCF操作
- 在面光源处生成一张shadow map
如何确定第2步中搜索shadow map的范围
可以根据到面光源的视锥与shadow map的相交区域确定
符号函数 $\chi^+(x) = x > 0 ? 1 : 0$
- 开销主要在第2步和第4步中
- 在区域中查询每一个像素需要花费大量时间
- 阴影越软,需要越大的filter区域,运行时间更长
- 优化思路:不查询整个区域,而是对区域进行部分采样
- 缺点:产生的结果有噪声
- 然而,现代技术对噪声的容忍度不断提升,因为后续可以在图像空间对结果进行降噪
- 因此现在一般都是在用PCSS
4 Variance Soft Shadow Mapping(VSSM)
- 针对性的解决 PCSS 中开销大的步骤
- 令 t 为 shading point 处的深度值
4.1 降低 PCF 开销
- 本质问题 —— 判断区域内有多少比例的 texel 比当前 shading point 的距离 t 要近
- 思路:快速地计算区域内深度值的均值和方差,并用正态分布去拟合,从而得到近似的比例值
- 求均值
- 硬件MIPMAP
- Summed Area Tables (SAT)
- 求方差
- $Var(X) = E(X^2) - E^2(X)$
- 可以在shadow map中额外增加一个通道,用于存储 $X^2$ 的值
- 引入切比雪夫不等式
- $P(x>t) \le \frac{\sigma^2}{\sigma^2 + (t - \mu)^2}$,前提:t 必须在 $\mu$ 的右边
- 甚至不需要假设它的分布为正态分布!
- 实时渲染中,不等号看做约等号
- 性能分析
- shadow map 生成
- 在生成 shadow map 的同时,再同时生成一张 square depth map
- 运行时间
- 范围内深度均值:O(1)
- 范围内深度平方的均值:O(1)
- 切比雪夫:O(1)
- 不需要采样和循环遍历
- shadow map 生成
4.2 降低 blocker search 的开销
- 我们需要得到遮挡物的平均深度,记作 $z{occ}$,未遮挡的平均深度记作 $z{unocc}$
- 观察可知: $\frac{N1}{N} z{unocc} + \frac{N2}{N} z{occ} = z_{avg}$
- 近似结果:
- N1 / N = P(x > t) → 由切比雪夫不等式解决!
- N2 / N = 1 - P(x > t)
- 未遮挡的深度全部认为和 shading point 的深度一样,即 $z_{unocc} = t$
4.3 MIPMAP 和 Summed-Area Variance Shadow Map
- 快速得到矩形区域范围内的均值
- Mipmap
- 快速、近似、矩形
- 是个近似结果,有些情况需要三线性插值
- Summed-Area Table (SAT)
- 二维前缀和
- 准确值
- 会引入一些额外开销
- 构建时需要 O(n) 的时间复杂度以及 O(n) 的空间复杂度
5 Moment Shadow Mapping
VSSM的缺陷
- 在某些情况下近似的结果不准
- 偏黑 - 通常能忍受,偏白 - 漏光!
- 切比雪夫不等式只在 $t > z_{avg}$ 的时候准确
- 在某些情况下近似的结果不准
目标:让深度的分布更准确
思路:使用更高阶的矩 (Moment) 来描述分布
矩 (Momenet)
- 最简单的形式: $x, x^2, x^3, x^4, \cdots$
- VSSM使用了前两阶的矩
用前 m 阶矩描述分布的累积分布函数(CDF)
类似于某种展开
展开的越多,越接近PCF得到的准确值
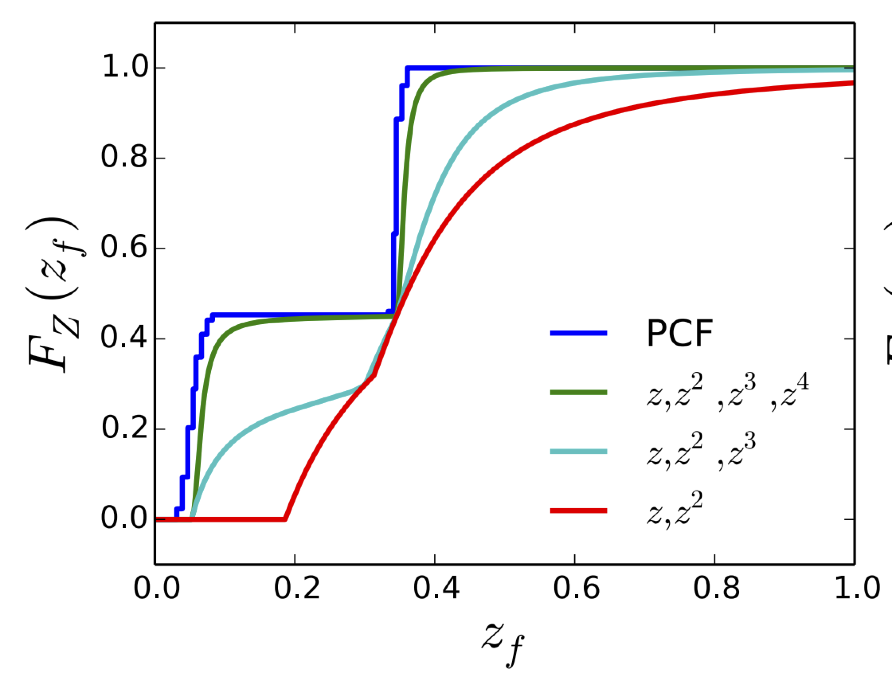
一般取 4 ,得到一个更准确的近似结果
表达式非常复杂
缺点
- 存储量增加
- 运算消耗增加
6 Distance Field Soft Shadows
6.1 SDF
SDF = Signed Distance Field,有向距离场
Distance function
- 定义空间中的任何一点到给定物体表面的最小距离
- 距离可以带正负号
如何计算 Distance function
- 使用空间划分的结构
- 八叉树等
- 使用空间划分的结构
前沿拓展:optimal transport
应用
使用Ray marching / Sphere tracing 来计算光线与 SDF 的交点

- 任意一点的 SDF 值定义了该点处的一个安全距离
- 在这个安全距离范围内,一定不会与任何物体相交
- 从光线起点开始,每次前进 SDF(p) 的距离,直到找到交点
使用SDF生成软阴影

- 可以用 SDF 来得到被遮挡比例的近似值
- 根据 SDF 给出的安全距离,得到一个对应的安全角度
- 在这个安全角度内,没有任何遮挡物
- 如果安全角度越小,那么 visibility 越小
字体渲染
- 可以得到任意分辨率下的高清字体
6.2 Distance Field Soft Shadows
用安全角度的大小来近似 visibility 值,从而得到不同亮度的阴影 → 软阴影
计算安全角度
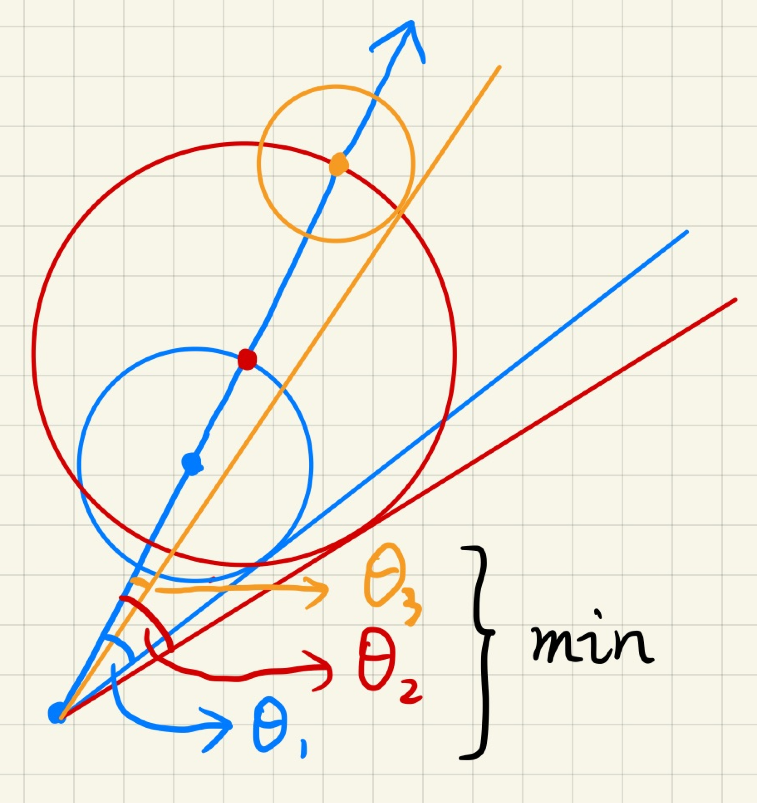
- 在 ray marching 的过程中,每一步都计算当前的安全角度值
- 取所有角度的最小值,作为最终结果
- 如何得到角度
- 准确值: $\arcsin \frac{SDF(p)}{p - o}$
- 近似值: $\min { \frac{k \cdot SDF(P)}{p - o} , 1.0}$
- k 越大,近似值越容易取到 1,阴影越硬
- k 可以控制阴影的软硬程度
优点
- 快
- 在ray marching的过程中,与生成硬阴影的速度相当
- 高质量
- 快
缺点
- 需要预计算
- 需要大量的存储空间
- 无法使用在变形物体上